副標(biāo)題#e#
隨著計算機(jī)應(yīng)用技術(shù)的發(fā)展,計算機(jī)仿真已成為現(xiàn)代機(jī)構(gòu)學(xué)重要的科研手段,它在可行性論證、工程設(shè)計和尋求最佳方案等方面發(fā)揮著重要作用,因而為機(jī)構(gòu)仿真提供準(zhǔn)確數(shù)據(jù)來源的運動分析也顯得尤為重要。目前,國外機(jī)構(gòu)運動分析方面的軟件在人機(jī)交互、圖形圖像處理和可視化方面做的比較好,但在運動分析時一般采用非線性方程組迭代求解,速度慢,特別是對于比較復(fù)雜的機(jī)構(gòu)就更慢,有時甚至不能收斂;國內(nèi)這方面的軟件在運動分析及受力分析方法方面已達(dá)到世界先進(jìn)水平,但大多是用二維符號表示傳動類型和機(jī)構(gòu)結(jié)構(gòu)類型,一般也僅著眼于數(shù)值計算,缺乏與三維CAD技術(shù)的緊密結(jié)合,不適合一般工程技術(shù)人員使用。
所以說以強(qiáng)大的三維實體造型軟件為支撐軟件結(jié)合國內(nèi)先進(jìn)的分析方法,開發(fā)具有自主知識產(chǎn)權(quán)的連桿機(jī)構(gòu)參數(shù)化實體運動分析和仿真系統(tǒng)是十分有意義的。文中采用的軟件平臺是SolidWorks,分析理論采用型轉(zhuǎn)化理論和廣義型轉(zhuǎn)化理論。
1連桿機(jī)構(gòu)運動分析與仿真系統(tǒng)的實現(xiàn)
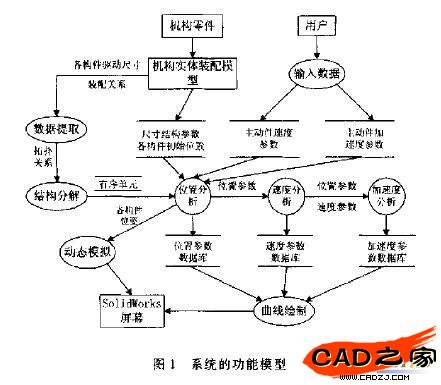
系統(tǒng)具備對由轉(zhuǎn)動副、移動副等連接而成的連桿機(jī)構(gòu)進(jìn)行三維參數(shù)化實體建模、運動學(xué)分析以及動態(tài)仿真的功能(見圖1)
1.1參數(shù)化構(gòu)件庫的建立及實體裝配
為了實現(xiàn)構(gòu)件的快速建模和避免重復(fù)性工作,建立了一些常用構(gòu)件的三維參數(shù)化模板庫.用戶可以在特征模板中查詢和調(diào)用各種構(gòu)件模型(如圖2).構(gòu)件建模時應(yīng)充分利用SolidWorks提供的16種幾何約束關(guān)系,以得到各種特征之間的幾何約束關(guān)系.
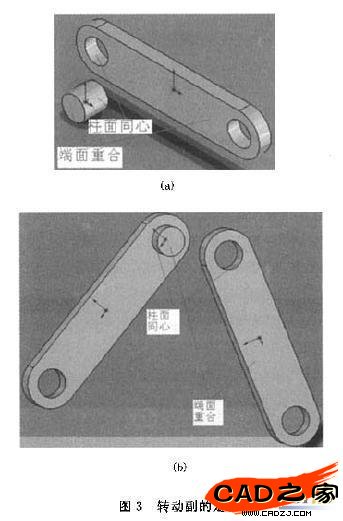
SolidWorks中的配合是基于特征的,而機(jī)構(gòu)中各構(gòu)件是通過運動副連接的,因此,裝配時構(gòu)件之間的配合特征要體現(xiàn)出運動副的類塑特性.圖3說明了轉(zhuǎn)動副的定義過程.
所以說以強(qiáng)大的三維實體造型軟件為支撐軟件結(jié)合國內(nèi)先進(jìn)的分析方法,開發(fā)具有自主知識產(chǎn)權(quán)的連桿機(jī)構(gòu)參數(shù)化實體運動分析和仿真系統(tǒng)是十分有意義的。文中采用的軟件平臺是SolidWorks,分析理論采用型轉(zhuǎn)化理論和廣義型轉(zhuǎn)化理論。
1連桿機(jī)構(gòu)運動分析與仿真系統(tǒng)的實現(xiàn)
系統(tǒng)具備對由轉(zhuǎn)動副、移動副等連接而成的連桿機(jī)構(gòu)進(jìn)行三維參數(shù)化實體建模、運動學(xué)分析以及動態(tài)仿真的功能(見圖1)
1.1參數(shù)化構(gòu)件庫的建立及實體裝配
為了實現(xiàn)構(gòu)件的快速建模和避免重復(fù)性工作,建立了一些常用構(gòu)件的三維參數(shù)化模板庫.用戶可以在特征模板中查詢和調(diào)用各種構(gòu)件模型(如圖2).構(gòu)件建模時應(yīng)充分利用SolidWorks提供的16種幾何約束關(guān)系,以得到各種特征之間的幾何約束關(guān)系.

SolidWorks中的配合是基于特征的,而機(jī)構(gòu)中各構(gòu)件是通過運動副連接的,因此,裝配時構(gòu)件之間的配合特征要體現(xiàn)出運動副的類塑特性.圖3說明了轉(zhuǎn)動副的定義過程.
1. 2裝配信息的提取與轉(zhuǎn)化
在SolidWorks環(huán)境中裝配好的機(jī)構(gòu)并不能直接用于機(jī)構(gòu)分析,必須提取出裝配體的配合特征信息,并將其轉(zhuǎn)化為機(jī)構(gòu)分解與分析所需要的拓?fù)湫畔⒑徒Y(jié)構(gòu)數(shù)據(jù).
通過遍歷所有配合特征,得到配合特征的名稱和兩個配合構(gòu)件的名稱.裝配信息向拓?fù)湫畔⒌霓D(zhuǎn)化是以構(gòu)件的名稱為索引通過遍歷裝配特征信息鏈表實現(xiàn)的.首先通過SolidWorks API提供的方法遍歷裝配體,得到固定構(gòu)件(即機(jī)架)名稱.然后以機(jī)架名稱為索引遍歷鏈表,找到與機(jī)架相連的構(gòu)件名稱"Partl<1>",并為其編號;再次以"Partl <1>"為索引遍歷鏈表,…,依次類推,所有構(gòu)件和運動副被按序編號,從而得到機(jī)構(gòu)的拓?fù)湫畔?