1 二次曲面距離函數(shù)參數(shù)化
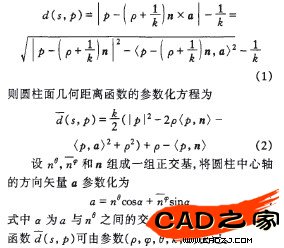
非線性最小二乘法是曲面擬合中最常用的方法,根據(jù)最小二乘法原理,使數(shù)據(jù)點(diǎn)到所擬合曲面的距離的平方和
![]()
最小,其中m為三維數(shù)據(jù)點(diǎn)。s為曲面的參數(shù)。
距離函數(shù)的表達(dá)形式直接影響非線性方程組的求解和最小二乘解的精確度,為了避免在求解非線性最小二乘方程組時(shí)出現(xiàn)奇異值,本文擬合算法中采用立曲面距離函數(shù)的參數(shù)化方程。
1.1 直圓柱面距離函數(shù)參數(shù)化
設(shè)圓柱面到坐標(biāo)原點(diǎn)的最近距離為pn,其中n為圓柱的法向量,且|n|=1。設(shè)圓柱中心軸的方向矢量為a,且|a|=1,圓柱半徑為1/k,(n,a)=0,p為空間任意一點(diǎn)到圓柱的距離為:
1.2 二次曲面擬合算
從上述的分析可看出,對(duì)于二次曲面的擬合都需要求解非線性最小二乘解問(wèn)題。本文采用Levenberg.Marquardt方法求解。通常這樣的迭代方法都需要給定一個(gè)較好的初始值,曲面擬合算法的一般步驟為:①建立圓柱面幾何距離函數(shù)的參數(shù)方程。②任選一個(gè)數(shù)據(jù)點(diǎn)作為基準(zhǔn)點(diǎn)。找出該點(diǎn)的是個(gè)鄰近點(diǎn)(本文取k=10),以這些數(shù)據(jù)點(diǎn)擬合一張面,作為擬合曲面在該點(diǎn)的切平面。該平面的法矢就是曲面在該點(diǎn)的法矢,由此可以確定參數(shù)。可設(shè)參數(shù)P的初始值為零。③估算擬合曲面的旋轉(zhuǎn)軸口。曲面上每個(gè)點(diǎn)的法矢應(yīng)該與旋轉(zhuǎn)軸相交,可以首先計(jì)算出曲面在一些數(shù)據(jù)點(diǎn)處的法矢,構(gòu)造出通過(guò)該點(diǎn)、方向矢量為點(diǎn)法矢的直線,通過(guò)直線的求交來(lái)初步確定旋轉(zhuǎn)軸。即給出空間的m條直線,求出和這些直線都相交的直線,則該直線就是所要求的軸線。④將曲面各參數(shù)的估計(jì)值作為迭代初始值進(jìn)行迭代計(jì)算,最后得到迭代最優(yōu)解。
2 打結(jié)器5個(gè)異面軸角度求解
(1) 在Imageware環(huán)境中,分別把5個(gè)軸孑L點(diǎn)云分割出來(lái),去掉噪聲點(diǎn)后用最小二乘法進(jìn)行擬合。由于擬合的精度直接決定了軸孔角度,因此對(duì)這5個(gè)孔擬合要達(dá)到較高的擬合精度,平均誤差控制在0.02之內(nèi)。擬合后,把擬合的圓柱面和點(diǎn)云對(duì)比,偏差較大的地方要?jiǎng)h除點(diǎn)云上的噪聲點(diǎn),然后再進(jìn)行擬合,直到達(dá)到要求的精度為止。按照相同的程序依次對(duì)5個(gè)軸孔進(jìn)行擬合。以機(jī)架動(dòng)力軸孔下端面與XOY平面,動(dòng)力軸孔與ZC軸,軸孔4與YC軸,用stepwise分布式對(duì)齊命令一一對(duì)齊。
(2)把這5個(gè)軸孔導(dǎo)入到UG NX3中。在UG中。使用命令文件/導(dǎo)入/Imagewarel2后會(huì)出現(xiàn)導(dǎo)入對(duì)象選擇框。選擇所要導(dǎo)入的文件之后形成軸孔關(guān)系圖,如圖1所示。

圖1 軸孔關(guān)系圖
1.打結(jié)器軸孔2.刀架軸孔3.打結(jié)嘴軸孔4.夾繩器軸孔5.夾繩器驅(qū)動(dòng)蝸桿軸孔
(3) 在UG建模環(huán)境中,用命令插入/基準(zhǔn)/基準(zhǔn)平面,彈出偏置浮動(dòng)框,分別對(duì)XOY正向偏置80mm,ZOX和ZOY反向偏置80mm,建立投影基準(zhǔn)面如圖2所示。
圖2 投影基準(zhǔn)面
(4) 畫(huà)出5個(gè)軸孔中心線,使用命令插入/曲線/直線,分別連接每個(gè)軸孔端面圓心,然后使用命令插入/曲線中的一條曲線/投影,選擇要投影的線和投影到的基準(zhǔn)面分別建立XOY,ZOX和ZOY的投影圖,為了表示投影關(guān)系,把對(duì)應(yīng)的投影直線的端點(diǎn)用直線連接起來(lái),得到5個(gè)軸孔中心線的俯視,側(cè)視和正視投影,如圖3所示。
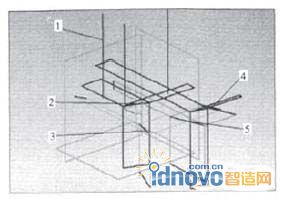
圖3 軸孔中心線投影
(5) 進(jìn)入U(xiǎn)G工程圖模塊,使用命令插入/視圖/基本視圖,得到三視圖。以第1軸為基準(zhǔn)軸,分別測(cè)量和標(biāo)注其余4軸同基準(zhǔn)軸之間的角度關(guān)系。如圖4所示。
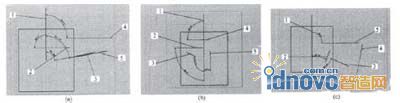
圖4 各軸為基準(zhǔn)軸角度關(guān)系
(a)正視圖(b)側(cè)視圖(c)俯視圖
以軸1為基準(zhǔn)軸,由圖4得到:軸2與軸1的交角,在正視圖XOZ上為90.00°。在側(cè)視圖YOZ上為90.00°,在俯視圖XOY上為23.39°;軸3與軸1的交角,在XOZ上80.36°,在YOZ上為69.60°,在XOY上為66.18°;軸4與軸1的交角,在XOZ上為90.00°,在YOZ上為90.00°,在xoy上為12.00°;軸5與軸1的交角,在XOZ上為81.12°,在YOZ上為0°,在X0y上為90.00°。
完成軸孔擬合和角度測(cè)量后,可以對(duì)打結(jié)器的端面和外表面擬合CAD建模,然后到Imageware中進(jìn)行精度檢驗(yàn),得到CAD模型和點(diǎn)云對(duì)比圖,如圖5所示。

圖5 機(jī)架CAD模型和點(diǎn)云對(duì)比圖
打結(jié)器機(jī)架三維造型后,同樣可能存在誤差。可把UG NX軟件重構(gòu)的三維模型讀入Imageware軟件中,比較分析最終重構(gòu)的三維模型和掃描點(diǎn)云之間的偏差。通過(guò)用彩色云圖將差異顯示出來(lái),可以很直觀地了解到重構(gòu)曲面與點(diǎn)云之間的誤差值,并且可以指定一個(gè)可接受的公差帶,圖5的總體公差規(guī)定在±0.5mm之間。如果達(dá)不到0.5mm的公差,要把三維CAD模型重新調(diào)入Imgewarel2中擬合,直至達(dá)到要求為止。孔的直徑要保證誤差很小。可以求出在公差帶內(nèi)點(diǎn)的數(shù)量,從而檢測(cè)逆向掃描測(cè)量的精確性。
3 結(jié)束語(yǔ)
基于逆向工程技術(shù),采用2種軟件Image—warel2和UGNX3相結(jié)合的辦法。對(duì)空間異面軸角度進(jìn)行了測(cè)量。在測(cè)量時(shí)。只需要掃描軸孔的端面,大大節(jié)省了時(shí)間;擬合表達(dá)式簡(jiǎn)單且準(zhǔn)確。三面投影的空間角度表達(dá)方法,能夠準(zhǔn)確反映空間異面軸的空間姿態(tài),即打結(jié)器軸(軸1)、刀架軸(軸2)、打結(jié)嘴軸(軸3)、夾繩器軸(軸4)和夾繩器(軸5)驅(qū)動(dòng)蝸桿軸的空間角度之間的關(guān)系。
相關(guān)文章
- 2021-09-08BIM技術(shù)叢書(shū)Revit軟件應(yīng)用系列Autodesk Revit族詳解 [
- 2021-09-08全國(guó)專業(yè)技術(shù)人員計(jì)算機(jī)應(yīng)用能力考試用書(shū) AutoCAD2004
- 2021-09-08EXCEL在工作中的應(yīng)用 制表、數(shù)據(jù)處理及宏應(yīng)用PDF下載
- 2021-08-30從零開(kāi)始AutoCAD 2014中文版機(jī)械制圖基礎(chǔ)培訓(xùn)教程 [李
- 2021-08-30從零開(kāi)始AutoCAD 2014中文版建筑制圖基礎(chǔ)培訓(xùn)教程 [朱
- 2021-08-30電氣CAD實(shí)例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風(fēng)暴2:Maya影像實(shí)拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術(shù)設(shè)計(jì)案例教程中文版AutoCAD 建筑設(shè)計(jì)案例
- 2021-08-29環(huán)境藝術(shù)制圖AutoCAD [徐幼光 編著] 2013年P(guān)DF下載
- 2021-08-29機(jī)械A(chǔ)utoCAD 項(xiàng)目教程 第3版 [繆希偉 主編] 2012年P(guān)DF